


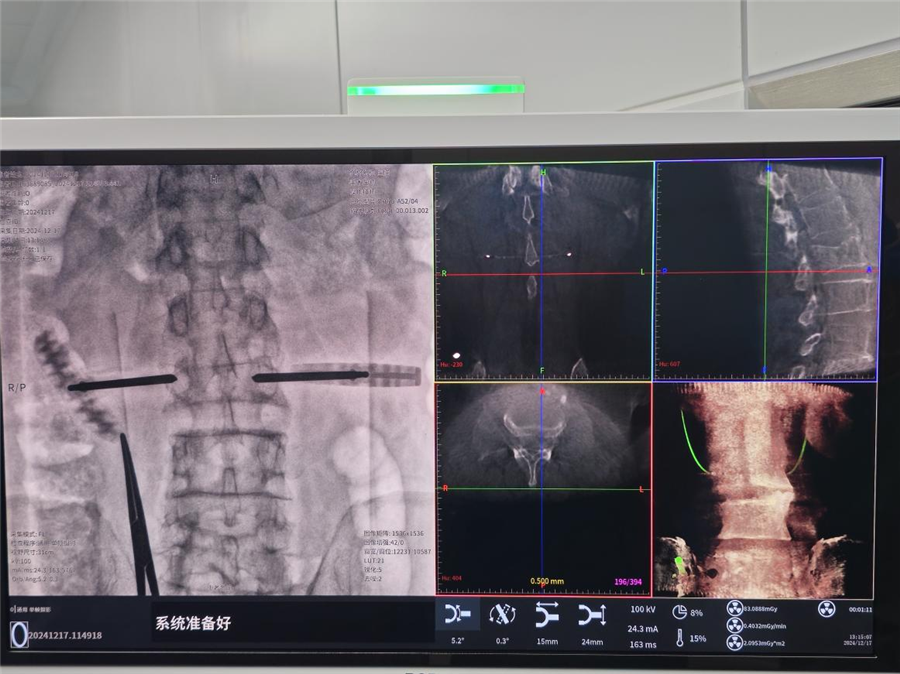
椎体成形术是一种治疗腰椎骨折的微创手术,其关键步骤是经皮经椎弓根穿刺置管到椎体。在传统手术中,医生需要多次进行X线透视以寻求定位和操作,医生和患者在受到放射性损害同时也存在着植入物发生偏移的风险。机器人系统能够突破人眼、人手的极限,利用计算机辅助技术实现患者的骨骼和周围组织的三维模型重建,仿照经皮骨水泥椎体成形术的施术步骤,协助医生规划最佳的骨水泥通道路径和植入物位置,操作偏差≤0.2毫米。
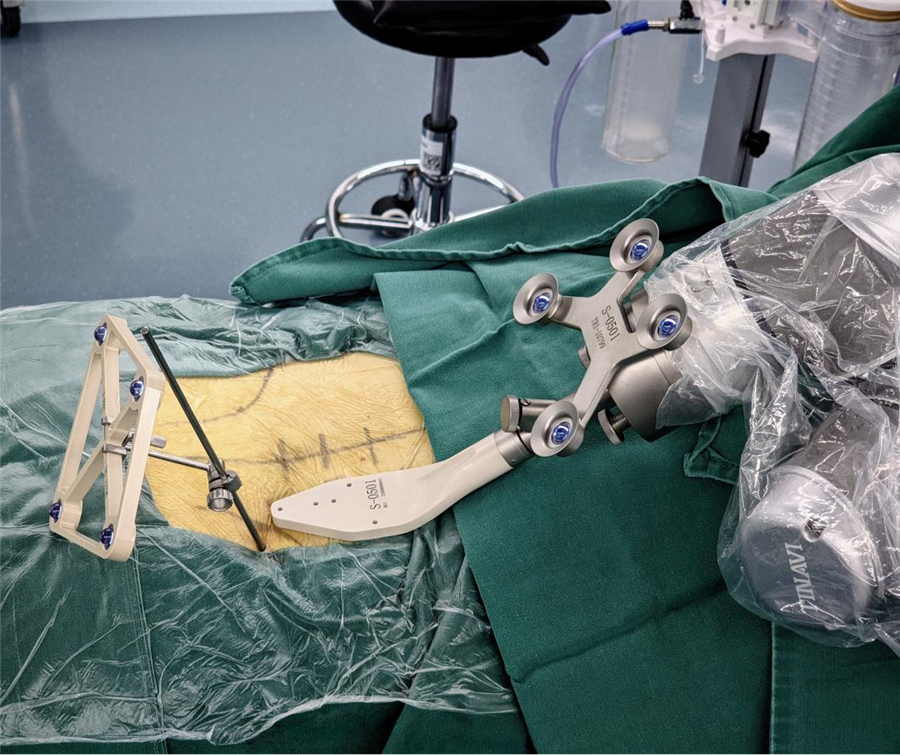
首先机器人会根据术前规划的路径和角度调整机械臂的位置,将导管送到规划位置,确保导管精准置入。
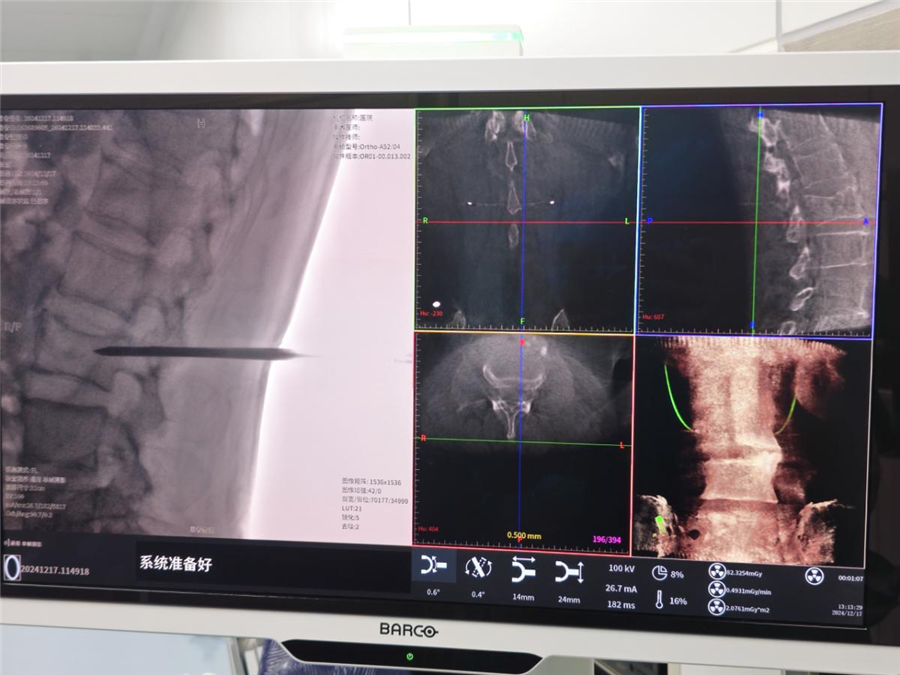
该技术简化了手术操作步骤,降低了手术难度,在精确控制和导航功能下,医生在最少切开皮肤的情况下植入器械,完成微创手术操作;通过一次扫描构建术中图像,可降低70%患者和医生所受的放射性损害;机器人系统具有运动仿真技术、关节力控制技术和障碍物检测等保护功能,可以确保手术过程中的安全性;该技术的应用提高了手术的精准度和安全性,降低了手术风险和并发症,减少了患者手术创伤的痛苦,实现患者快速康复。









 当前位置:
当前位置: 

